
\[ \]
\[ \]
\[ \]
Issue No 32, 19 June 2023
By: Anthony O. Ives
Helicopter forward flight produces performance benefits as well as further complexities. As the helicopter transitions from hover to forward flight the required power for flight reduces due to a effect called translational lift [1] which is usually experienced at a forward speed of around 15 knots [2]. However, the rotor airflow becomes unsymmetrical with forward flight resulting in rolling action which must counteracted to some degree by the pilot.
The sequence of actions by the pilot for transitioning from hover to forward flight are as follows:
Pilot pushes forward gently and smoothly on the cyclic stick, this lowers the nose of the helicopter which tilts the rotor forward which gives a forward component of the rotor thrust which then generates forward motion.
The pilot intially increases the collective slightly because some of the rotor thrust is being used to propel the helicopter forward therefore the component that is left is not enought to prevent the helicopter sinking.
The pilot will also adjust the pedals appropiately to compensate for the change in power.
The pilot should also anticipate flapback which requires some more forward cyclic, flapback is caused by the aerodynamics of the rotor.
As the helicopter gains forward speed and the translational lift effect is experienced the pilot can lower the collective lever and adjust the pedals again.
The pilot will also counteract any rolling effect with the appropiate sideways cyclic stick movements due to dissymmetry of lift (the unsymmetrical effects due to forward flight).
The above sequence of actions describles a precision transition where the pilot does not want the helicopter to gain altitude however, the a similar sequence of actions is used if the helicopter is taking off and climbing to a specific altitude the only difference is for step 5 the pilot does not reduce the collective lever but increases to a power level required to climb.
Another point to note from the above sequence is that raising and lowering the collective lever always requires a co-ordinated change for the anti-torque pedals. Increasing the collective lever will increase power which will increase the tendency of the helicopter to yaw so therefore the pedals have to be adjusted accordingly. This is based on the princple of newton's 3rd law [3], for example for a counter-clockwise rotating rotor increasing collective will require more left pedal, reducing collective will require right pedal. The situation is reversed for clockwise rotating rotor.
In previous articles [4] and [5] inflow has been discussed and the fact it can reduce thrust however, inflow also increases the power required [6]. Most of the power required to hover is due to induced losses from inflow effects and recirculation of the rotor downwash. However, as the helicopter transitions to forward flight the inflow is carried away by the airflow generated by forward flight. You can see from the power equation given in reference [6] reducing inflow will reduce the amount powered required. This effect is known as 'translational lift'. The picture below illustrates how inflow is reduced in forward flight.
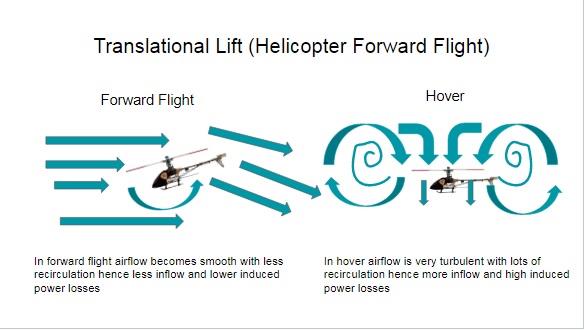
While the benefit of helicopter forward flight is less power required the rotor flow becomes more complex. In hover the rotor flow is symmetrical however, in forward flight the forward airflow generated causes the flow of the advancing side of the rotor to be faster but the flow of the retreating side of the rotor to be slower. The advancing side the rotor blade is moving in the direction of forward flight however, the retreating side of the rotor is moving in the opposite direction of forward flight [7]. This difference in speed on each side of the rotor causes more lift [8] to be produced on the advancing side and less lift to be produced on the retreating side. This difference of lift on each side of the rotor causes the helicopter to roll however, most of the effect is removed by allowing the rotor blades to flap, and the rest is compensated by the pilot applying sideways cyclic stick. This effect is known as 'dissymmetry of lift'.
Dissymetry of lift is quite complex to understand however, in future articles vectors will be introduced which help you understand why there are differences on each side of the rotor also a future article will explain how allowing the rotor blades to flap reduce the effect of dissymetry of lift.
Flapback was also the other effect that was experienced during transition to forward flight, which is very complex and related to the rotor aerodynamics, flap back is responsible for most of the instability typical of helicopters. For more on translational lift, dissymetry of lift and flapback see reference [2] for some more simple explanations, for more complicated mathematical explanations see reference [9].
Please leave a comment on my facebook page or via email and let me know if you found this blog article useful and if you would like to see more on this topic. Most of my blog articles are on:
Mathematics
Helicopters
VTOL UAVs (RC Helicopters)
Sailing and Sailboat Design
If there is one or more of these topics that you are specifically interested in please also let me know in your comments this will help me to write blog articles that are more helpful.
References:
[1] Learning to Fly Helicopters, R. Randall Padfield, 1992, McGraw Hill
[2] The Helicopter Flying Handbook, FAA-H-8083-21B, 2019, United States Department of Transportation, Federal Aviation Administration, https://www.faa.gov/regulations_policies/handbooks_manuals/aviation/helicopter_flying_handbook
[3] http://www.eiteog.com/EiteogBLOG/No25EiteogBlogNewton.html
[4] http://www.eiteog.com/EiteogBLOG/No4EiteogBlogThrust.html
[5] http://www.eiteog.com/EiteogBLOG/No11EiteogBlogThrust.html
[6] http://www.eiteog.com/EiteogBLOG/No16EiteogBlogThrust.html
[7] http://www.eiteog.com/EiteogBLOG/No10EiteogBlogCircle.html
[8] http://www.eiteog.com/EiteogBLOG/No1EiteogBlogLiftCL.html
[9] Helicopter Theory, Wayne Johnson, 1980, Dover Publications
![]()

Disclaimer: Eiteog makes every effort to provide information which is as accurate as possible. Eiteog will not be responsible for any liability, loss or risk incurred as a result of the use and application of information on its website or in its products. None of the information on Eiteog's website or in its products supersedes any information contained in documents or procedures issued by relevant aviation authorities, manufacturers, flight schools or the operators of aircraft, UAVs.
For any inquires contact: [email protected] copyright © Eiteog 2023